 |
| User-Centric Control Reduces Drone Accidents | iHLS Israel Homeland Security |
The study was comprised of two experiments wherein participants used flight simulators to compare the ease and safety of user-centric controls (such as those used by an airplane pilot) with external piloting (remote control methods ranging from joysticks to smartphone apps).
The 30 participants had no prior experience driving drones or remote control cars, and were tasked with guiding their drone through an obstacle course. The study measured obstacle avoidance response time as well as avoidance success rate, and shows the user-centric interface improving performance on both counts.
Findings support the conclusion that a user-centric interface design significantly improves performance of drone pilots, and resolves some of the user control issues undermining drone safety.
Professor Kwangsu Cho explains "despite increases in drone-crashes, research and development on user-centered control interfaces has been limited. The user interface of drones is critical to safety, quality piloting, and satisfaction. We are developing other user-centered drone interfaces especially for non-experts, and are eager to collaborate with manufacturers to improve safety".
Fly a Drone Safely: Evaluation of an Embodied Egocentric Drone Controller Interface
Abstract - As the activity of flying drones becomes
increasingly widespread, drone accidents are also increasing. Many of
these accidents
are related to operational issues and, therefore,
it is urgent to improve drone controls. The purpose of this study was to
evaluate the usability of a drone controller
interface supporting an external pilot's egocentric perspective. The
interface
tried to solve the problem of misaligned
perspectives that arise from controllers constructed from a
drone-centric or allocentric
perspective. To achieve this, two experiments were
performed to identify the differences in control performance depending
on embodied mental rotation. The results of the
experiments revealed that the controller designed from the pilot's
egocentric
point of view had a stronger performance regardless
of the direction of drone flight. Based on the results, implications
are
discussed.
-
External piloting is considered as one of the fundamental causes of frequent drone crashes.
-
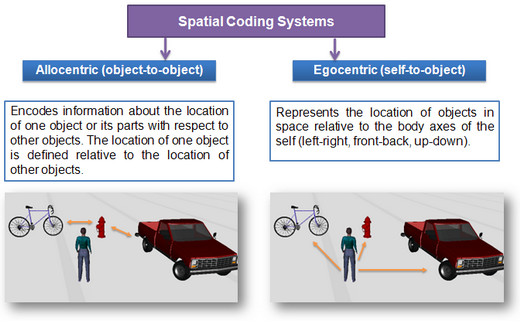
External piloting causes a misalignment problem due to the difference between the drone-centric or allocentric perspective and an external pilot's egocentric perspective.
-
The egocentric drone control interface outperforms the traditional, drone-centric control interface by removing the cognitive load of mental rotation generated by the process of aligning two different perspectives.
No comments:
Post a Comment